While we try to keep things accurate, this content is part of an ongoing experiment and may not always be reliable.
Please double-check important details — we’re not responsible for how the information is used.
Artificial Intelligence
“Revolutionizing Materials Science: FLUID, the Open-Source 3D-Printed Robot”
FLUID, an open-source, 3D-printed robot, offers an affordable and customizable solution for automated material synthesis, making advanced research accessible to more scientists.











Artificial Intelligence
“Revolutionizing Computing with the ‘Microwave Brain’ Chip”
Cornell engineers have built the first fully integrated “microwave brain” — a silicon microchip that can process ultrafast data and wireless signals at the same time, while using less than 200 milliwatts of power. Instead of digital steps, it uses analog microwave physics for real-time computations like radar tracking, signal decoding, and anomaly detection. This unique neural network design bypasses traditional processing bottlenecks, achieving high accuracy without the extra circuitry or energy demands of digital systems.
Artificial Intelligence
“Tiny ‘talking’ robots form shape-shifting swarms that heal themselves”
Scientists have designed swarms of microscopic robots that communicate and coordinate using sound waves, much like bees or birds. These self-organizing micromachines can adapt to their surroundings, reform if damaged, and potentially undertake complex tasks such as cleaning polluted areas, delivering targeted medical treatments, or exploring hazardous environments.

Artificial Intelligence
Accelerating Evolution: The Power of T7-ORACLE in Protein Engineering
Researchers at Scripps have created T7-ORACLE, a powerful new tool that speeds up evolution, allowing scientists to design and improve proteins thousands of times faster than nature. Using engineered bacteria and a modified viral replication system, this method can create new protein versions in days instead of months. In tests, it quickly produced enzymes that could survive extreme doses of antibiotics, showing how it could help develop better medicines, cancer treatments, and other breakthroughs far more quickly than ever before.


A New Horizon for Vision: How Gold Nanoparticles May Restore People’s Sight

Revolutionizing Quantum Communication: Direct Connections Between Multiple Processors

Retiring Abroad Can Be Lonely Business
Harnessing Water Waves: A Breakthrough in Controlling Floating Objects

Household Electricity Three Times More Expensive Than Upcoming ‘Eco-Friendly’ Aviation E-Fuels, Study Reveals

“Unveiling Hidden Patterns: A New Twist on Interference Phenomena”
Reducing Falls Among Elderly Women with Polypharmacy through Exercise Intervention
-
 Detectors1 year ago
Detectors1 year agoA New Horizon for Vision: How Gold Nanoparticles May Restore People’s Sight
-
Cancer1 year ago
Revolutionizing Quantum Communication: Direct Connections Between Multiple Processors
-
Earth & Climate1 year ago
Retiring Abroad Can Be Lonely Business
-
Albert Einstein1 year ago
Harnessing Water Waves: A Breakthrough in Controlling Floating Objects
-
Earth & Climate1 year ago
Household Electricity Three Times More Expensive Than Upcoming ‘Eco-Friendly’ Aviation E-Fuels, Study Reveals
-
Chemistry1 year ago
“Unveiling Hidden Patterns: A New Twist on Interference Phenomena”
-
Diseases and Conditions1 year ago
Reducing Falls Among Elderly Women with Polypharmacy through Exercise Intervention
-
Earth & Climate1 year ago
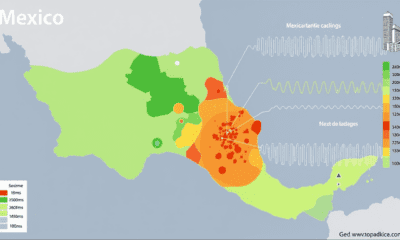
Predicting Damage from Local Earthquakes in Mexico City